The Mars Pathfinder Rover
Sojourner Truth
On the 30th anniversary of robotic exploration of Mars, NASA has selected
the name "Sojourner" for the first rover to explore the Red Planet. The
25-pound, six-wheeled robotic explorer, after the Mars Pathfinder lander
touched down on the planet's surface on July 4, 1997, was deployed to roam
on Ares Vallis, an ancient Martian flood plain.
The U.S. spacecraft Mariner 4 initiated humanity's study of the Red Planet
30 years ago today, when it flew by Mars at a distance of about 6,000 miles
(9,656 Km) on July 14, 1965, taking the first close-up images of another planet.
The name Sojourner was chosen for the Mars Pathfinder rover after a
year-long, worldwide competition in which students up to 18 years old were
invited to select a heroine and submit an essay about her historical
accomplishments. The students were asked to address in their essays how a
planetary rover named for their heroine would translate these
accomplishments to the Martian environment.
Valerie Ambroise, 12, of Bridgeport, Connecticut, submitted the winning essay
about Sojourner Truth, an African-American reformist who lived during the
Civil War era. An abolitionist and champion of women's rights, Sojourner
Truth, whose legal name was Isabella Van Wagener, made it her mission to
"travel up and down the land", advocating the rights of all people to be
free and the rights of women to participate fully in society. The name
Sojourner was selected because it means "traveler". JPL scientists and
engineers working on the Mars Pathfinder project and Planetary Society staff
members reviewed the 3,500 total entries received from all over the world,
including essays from students living in Canada, India, Israel, Japan,
Mexico, Poland and Russia.
The Rover Sojourner
 Sojourner is a small, six-wheel robotic vehicle built at the Jet Propulsion
Laboratory. She weighs in at a sleek 11.5 kg (25 lbs) and is about the size
of a milk crate (65 cm (26 inches) long by 18 cm (7 inches) tall), Sojourner
landed on Mars aboard the Pathfinder Spacecraft, but quickly stroke
out on her own to traverse the Martian terrain, perform science and
technology experiments, and transmit images and data back to the Lander
spacecraft. The Lander will then relay the information back to the
scientists and engineers waiting on Earth.
Sojourner is a small, six-wheel robotic vehicle built at the Jet Propulsion
Laboratory. She weighs in at a sleek 11.5 kg (25 lbs) and is about the size
of a milk crate (65 cm (26 inches) long by 18 cm (7 inches) tall), Sojourner
landed on Mars aboard the Pathfinder Spacecraft, but quickly stroke
out on her own to traverse the Martian terrain, perform science and
technology experiments, and transmit images and data back to the Lander
spacecraft. The Lander will then relay the information back to the
scientists and engineers waiting on Earth.
Although Sojourner needs only about four days to complete her primary
mission, she is designed to survive the cold Martian nights (which dip down
to a chilly -120°C) for many months.
Rover Solar Array:
Of course, all of Sojourner's equipment, including her computers, lasers,
motors, and radio modem require power. Sojourner generates most of her
power using a lightweight solar array. The array is easily visible as a
flat panel mounted on the top of the Rover.
The panel is actually made up of an "array" of over two hundred photovoltaic
solar cells. Each cell is about the size and width of a double-edge razor
blade. The cells are very light, thin, and fragile.
By electrically connecting these cells together in strings, the solar array
will provide Sojourner with around 16 watts of power at noon on Mars.
That's equivalent to the power used by a oven light, yet it allows the
power-efficient Rover to perform almost all her nominal mission activities.
Rover Batteries:
During the times when there is either too little or no sunlight for the
solar array, Sojourner can use batteries to power the Rover hardware.
Battery power is used cautiously since the batteries store only a limited
amount of energy, and once depleted, cannot be recharged. They are primarily
used for night time experiments and early morning operations on Mars, but
also provided power for periodic Rover communications ("health checks")
during the seven month cruise from Earth.
The three batteries are out of sight inside the Rover's gold-colored
electronics box mounted under the solar panel. Each battery looks something
like a black flashlight tube (without end caps), and each tube has three
D-size cells inside it. The tubes are strapped together around the Rover's
suspension axle, which runs through the middle of the electronics box.
Should either the batteries or the solar array fail, the Rover can complete
its primary mission using the other power source.
Power Electronics:
The power generated by the solar array and batteries is conditioned and
distributed using a complex arrangement of Power Electronics. The
electronics are fully integrated with the navigation and computer
electronics to save money, space, and mass, and yet still provide more than
ten different voltages to the various Rover hardware. Most of the power
electronic components used are commercially available.
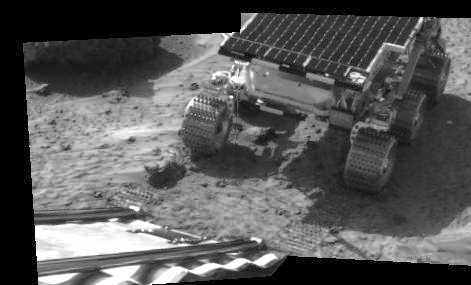
"Six wheels on soil!" The image above was taken by the IMP camera on July 5,
1997 (Sol 2). Sojourner's descent down the rear rover deployment ramp was
successful. The microrover's seven month journey from Earth to Mars is
complete. The soil beneath Sojourner (with tracks showing behind the right
rear wheel) will be the first target of the Alpha Proton X-Ray Spectrometer.
The image above shows the Sojurner Rover conducting its examination of
"Barnacle Bill" with the APXS. This image was taken by the fully deployed
(1.8 meters) IMP camera on Sol 4 (7 July 1997).
In the image above, taken with the Imager for Mars Pathfinder (IMP) at 8:45
p.m. PDT on Sol 6 (10 July 1997), Sojourner has made contact with the rock
Yogi. The rover's left rear wheel has driven up onto the Yogi's surface in
an attempt to get as close as possible to the rock's surface. Note the
tracks left by the rover as it turned around to get closer.
Sojourner will later use its Alpha Proton X-Ray Spectrometer (APXS)
instrument to conduct a study of Yogi's chemical composition.

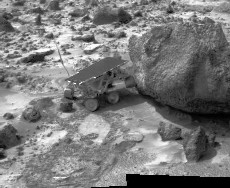
In the image above, taken with the Imager for Mars Pathfinder (IMP),
on Sol 18 (21 July 1997), Sojourner has made contact with the rock Yogi.
It clearly shows the "two-toned" surface of this large rock. The nature of
this color difference is not known, however. It might consist of wind-blown
dust accumulated on the surface (the rock is leaning into the prevailing
wind) or might be evidence of a break from a larger boulder as it was
deposited in the ancient flood that scoured this area.
Note the tracks left by the rover as it turned around to get closer.
Sojourner has used its Alpha Proton X-Ray Spectrometer (APXS) instrument to
conduct a study of Yogi's chemical composition.
A different, higher-resolution version of this image (65KB) can be obtained
from the Mars Pathfinder pages at:
Mars Pathfinder Mission
(NASA-JPL and all mirror sites)
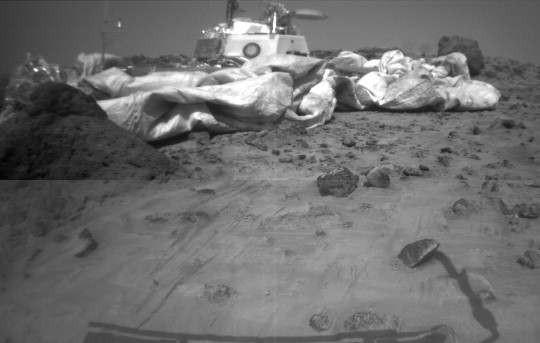
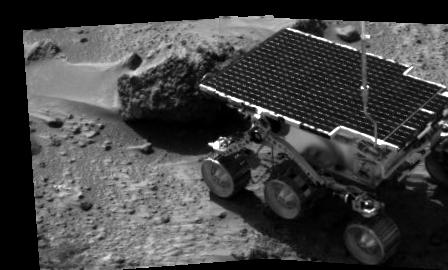
In the image above, taken by the Rover Sojourner, you can see the Mars
Pathfinder lander with its airbags. The dish-shaped object is the
high-gain antenna, the bright vertical cilinder is the low-gain antenna,
the lower part of the IMP camera's mast is to its left, the wind-socks
mast is further to the left.
The 'Mini Matterhorn' rock is to the left side. The shadows in the
foreground bottom are from the edge of the rover's solar panel and its
antenna. The rock Yogi is to right, behind the airbags.
A different, higher-resolution version of this image (146 KB) can be obtained
from the Mars Pathfinder pages at:
Mars Pathfinder Mission
(NASA-JPL and all mirror sites)
Updated: July 31 '97
Best seen with MS Internet Explorer.
Back to the Mars Pathfinder Page
in ARVAL
Messages:
Communications